Hướng dẫn xử lý bay chụp với Phantom 4 RTK
Đi cùng với sự phát triển của khoa học công nghệ hiện nay thì ngành đo đạc bản đồ đang ngày càng ứng dụng nhiều công nghệ, máy móc hiện đại để mang lại hiệu quả kinh tế cao và độ chính xác tuyệt đối. Một trong những phương pháp đo vẽ mới nhất là thành lập bản đồ bằng phương pháp bay chụp, sử dụng các thiết bị bay không người lái UAV để tạo ra mô hình ảnh và mô hình số độ cao có độ chính xác cao rất thuận tiện cho việc thành lập bản đồ địa hình tỷ lệ 1:500, 1: 1000 vv… Sau đây THC xin giới thiệu một số phương pháp đo đạc với UAV Phantom 4 RTK.
PHẦN I: GIỚI THIỆU VỀ UAV PHANTOM 4 RTK.
I. TÍNH NĂNG NỔI BẬT CỦA UAV PHANTOM 4 RTK.
1. Tích hợp hệ thống định vị chính xác cao
UAV Phantom 4 RTK được tích hợp mô đun RTK cho phép cung cấp dữ liệu thời gian thực chính xác đến từng centimet. Ngoài ra với trang bị mô đun GPS 2 tần số ( GNSS) sẽ giúp UAV có khả năng quan sát và thu thập dữ liệu vệ tinh GPS để sử dụng cho phương pháp đo PPK( đo động hậu xử lý). Điều này giúp cho UAV bay ổn định và đạt độ chính xác cao về dữ liệu hình ảnh.
2. Tích hợp hệ thống TimeSync.
Hệ thống này giúp cho UAV liên tục căn chỉnh, đồng bộ giữa điều khiển bay, mô đun RTK và hệ thống camera để chất lượng ảnh đạt độ chính xác cao nhất.
.png)
3. Cung cấp hình ảnh chính xác khi bay ở tốc độ cao.
Với cảm biến CMOS 1 Inch, 20 Megapixel sẽ giúp UAV đạt độ phân giải mặt đất GSD là 2,74cm khi bay ở độ cao 100m.
4. Chế dộ bay đa dạng.
UAV Phantom 4 RTK kết nối với điều khiển dễ dàng tạo nhiều chế độ bay khác nhau như chế độ bay quan trắc 2D,3D. Chế độ bay thiết lập các điểm định hướng sẵn, chế độ cảnh báo và nhận thức địa hình…
5. Tương thích với trạm di động D-RTK và các trạm Base khác.
UAV Phantom 4 RTK được sử dụng như 1 trạm Rover để kết nối với D- RTK hoặc các trạm Base khác khi đo bằng phương pháp RTK(đo động thời gian thực) để đạt độ chính xác ảnh cao nhất.
II. MỘT VÀI THÔNG SỐ KỸ THUẬT CỦA PHANTOM 4 RTK.
1. Thông số bay.
- Độ cao bay tối đa 8000m
- Tốc độ bay tối đa 58km/h.
- Tốc độ cất cánh tối đa 6m/s.
- Tốc độ hạ cánh tối đa 3m/s.
- Thời gian bay khoảng 30 phút/1 lần sạc pin.
- Nhiệt độ bay từ 0°-40°.
- Tần số bay từ 5.725 GHz – 5.850 GHz.
2. Thông số Camera và cảm ứng
- Camera 20 Megapixel.
- Ống kính FOV 84°. 8,8mm/24mm. Khoảng cách tự bắt nét thấp nhất 1m.
- Cảm ứng 4 chiều tiến, lùi, trái, phải.
- Phạm vi cảm biến chướng ngại vật từ 0.7m-30m.
- Định dạng ảnh JPG, kích thước ảnh lớn nhất 4:3 (4864*3648); 3:2 (5472*3648)
- Định dạng video MOV, chế độ ghi hình 4K.
- Hỗ trợ thẻ nhớ Micro SD, công suất tối đa 128 GB.
3. Thông số của bộ điều khiển
- Màn hình 5.5 inch screen. Hệ điều hành Android, ROM 4GB, bộ nhớ trong 16 GB.
- Tần số 5.725GHz đến 5.850 GHz( tại Mỹ và Trung Quốc)
- Khoảng cách điều khiển tối đa 7km.
- Tiêu thụ điện năng 16W.

PHẦN II: QUY ĐỊNH KỸ THUẬTTHU NHẬNVÀ XỬLÝ ẢNH SỐTỪTÀU BAY KHÔNG NGƯỜI LÁI
Việc sử dụng tàu bay không người lái để thành lập bản đồ phải tuân theo thông tư số 07/2021/TT-BTNMT được ký ngày 30/6/2021.
I. QUY ĐỊNH VỀ TÀU BAY KHÔNG NGƯỜI LÁI VÀ HỆ THỐNG THIẾT BỊ
1. Quy định về UAV.
- Việc sử dụng UAV phải tuân thủ các quy định tại Nghị định số 36/2008/ND-CP ngày 28/3/2008 và Nghị định số 79/2011/ND-CP ngày 5/9/2011 về sửa đổi bổ sung nghị định 36. Ngoài ra còn tuân thủ theo nghị định số 58/2010/ND-CP ngày 1/6/2010 quy định chi tiết và hướng dẫn thi hành một số điều của luật Dân quân tự vệ.
- Thiết bị UAV phải thỏa mãn các tiêu chuẩn được quy định tại Thông tư số 35/2017/TT-BQP ngày 12 tháng 2 năm 2017 của Bộ trưởng Bộ quốc phòng
a) Có khả năng bay ở chế độ tự động và bán tự động
b) Có trọng lượng cất cánh không vượt quá 25,0 kg
c) Có khả năng chịu gió tối thiểu 8m/s
- Thiết bị vô tuyến điện đi kèm UAV phải được đăng ký tần số theo quy định tại thông tư số 05/2015/TT-BTTTT ngày 23 tháng 3 năm 2015 của Bộ Thông tin và truyền thông
2. Quy định về máy ảnh số và thiết bị GNSS gắn trên UAV
- Máy ảnh số gắn trên UAV phải có tiêu cự cố định trong quá trình bay chụp, có chế độ tự chụp liên tục, chụp được ảnh màu tự nhiên RGB với độ phân giải hình ảnh không nhỏ hơn 20 Megapixel.
- Thiết bị điều khiển mặt đất có màn hình hiển thị và phải cài đặt được các chức năng cơ bản. Phần mềm xử lý phải có khả năng xử lý dữ liệu đầu vào bao gồm dừ liệu thu nhận từ UAV và dữ liệu trạm cố định, tạo lập các sản phẩm gồm đám mây điểm, DSM, DEM, bình đồ ảnh…
II. QUY ĐỊNH KỸ THUẬT VỀ SẢN PHẨM
- Quy định về ảnh gốc và độ cao bay chụp
a) Ảnh gốc phải có độ tương phản đồng đều, độ sáng, độ nét, màu sắc đảm bảo cho quá trình xử lý, độ nhòe không vượt quá 0,25 GSD.
b) Độ phủ ngang của ảnh gốc phải đảm bảo từ 60% đến 80%, độ phủ dọc không nhỏ hơn 70%.
c) Độ phân giải mặt đất tuân theo bảng sau
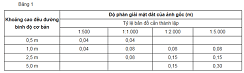
- Độ cao bay của UAV được tính theo công thức H=f*GSD/S
Trong đó: f là chiều dài tiêu cự ống kính máy, S là kích thước Pixel, GSD là độ phân giải mặt đất.
- Quy định về sản phẩm và độ chính xác dữ liệu
Sản phẩm sau khi xử lý dữ liệu gồm đám mây điểm, DSM, DEM, và bình đồ ảnh
+ Dữ liệu đám mây điểm được lưu trữ ở định dạng LAS, dữ liệu DSM, DEM được lưu trữ ở dạng raster( GEOTIFF-32bit) và định dạng ASC II, có kích thước dạng lưới ô vuông với kích thước quy định tại bảng sau:

+ Phạm vi dữ liệu phải được cắt chờm biên 1cm theo tỷ lệ bản đồ, không được có điểm trống trong khu vực bay.
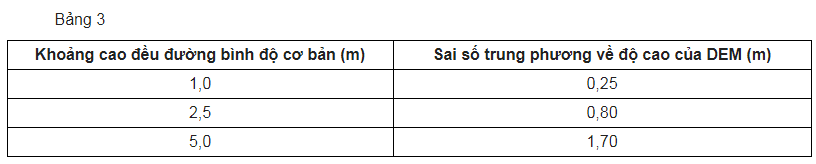
+ Sai số trung phương độ cao của mô hình DEM không vượt quá giới hạn tại bảng sau:
Sản phẩm bình đồ ảnh có định dạng GeoTiff- 24 bit, có màu sắc tự nhiên, hài hòa, không quá sáng tối, không bị lóa, không có mây che. Độ phân giải bình đồ ảnh được quy định theo bảng dưới:
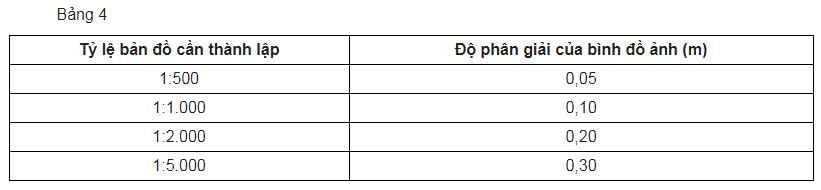
Sai số bình đồ ảnh không vượt quá 0,4mm so với điểm khống chế đo vẽ gần nhất theo tỷ lệ bản đồ cần thành lập.
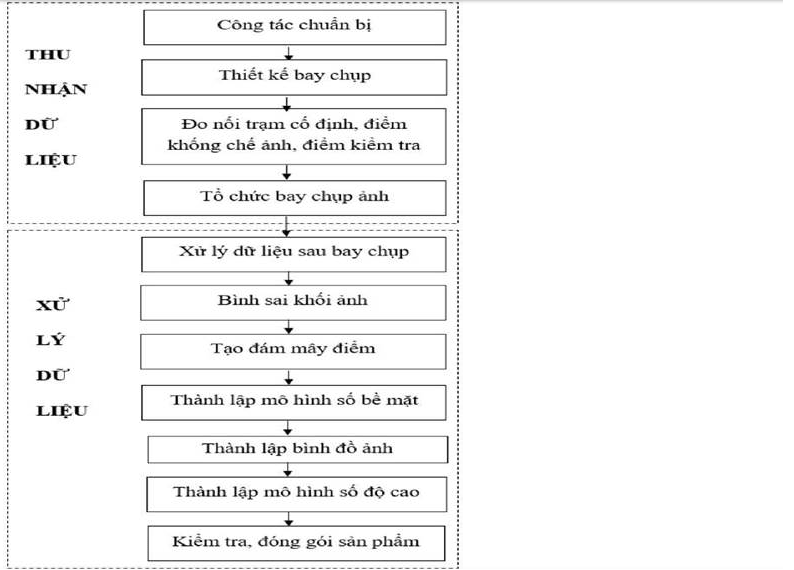
III.QUY ĐỊNH VỀ THU NHẬN VÀ XỬ LÝ DỮ LIỆU
Quy trình về thu nhận và xử lý dữ liệu gồm các bước sau
PHẦN 3. MỘT SỐ PHƯƠNG PHÁP ĐO VÀ XỬ LÝ SỐ LIỆU BẰNG PHANTOM 4 RTK.
I. PHƯƠNG PHÁP ĐO PPK.
- Khái niệm về PPK.
PPK là viết tắt của cụm từ “ Post- Processed Kinematic” đo động hậu xử lý.
Phương pháp này sử dụng một máy thu tín hiệu GPS bất kỳ để thu tín hiệu vệ tinh GNSS tại thời điểm bay. Đồng thời máy bay có trang bị hệ thống GNSS cũng thu tín hiệu vệ tinh vào thời điểm này. Số liệu sau khi bay được kết hợp xử lý để tính ra tọa độ tâm ảnh của quá trình bay.
- Ưu điểm của phương pháp này là không cần liên kết Drone với trạm base hoặc trạm cors, đạt độ chính xác cao cả về tọa độ và độ cao ảnh
- Nhược điểm là cần có thời gian xử lý bằng phần mềm chuyên dùng.
II. PHƯƠNG PHÁP ĐO RTK
- Khái niệm về RTK.
RTK là viết tắt của cụm từ “Read-time Kinematic” đo động thời gian thực.
Phương pháp này sử dụng hệ thống GNSS được trang bị sẵn trên máy bay để thu tín hiệu đồng thời từ vệ tinh và trạm Base- Drone hoặc trạm Cosr phát ra. Số liệu bay này được chỉnh lý đồng thời để đưa ra kết quả chính xác luôn ở thời điểm hiện tại
- Ưu điểm của phương pháp này là có số liệu nhanh chóng, chính xác về vị trí ảnh bay chụp.
- Nhược điểm của phương pháp này là tín hiệu kết nối giữa máy bay và các trạm phát hay bị gián đoạn, gây ra các lỗi về hình ảnh. Mô hình số độ cao đạt độ chính xác chưa cao.
III. PHƯƠNG PHÁP ĐO GCP
- Khái niệm về GCP
GCP là các mục tiêu được định vị trên trái đất ở các vị trí địa lý chính xác, hay còn gọi là điểm kiểm soát mặt đất. Đây là cách bay phổ biến được nhiều người sử dụng. Phương pháp này bổ trợ cho cách bay PPK và RTK. Số liệu bay được kiểm tra và xử lý dựa trên các điểm khống chế GCP.
- Ưu điểm của phương pháp này là xử lý chuẩn xác số liệu bay chụp một cách đáng tin cậy
- Nhược điểm là cần thời gian xử lý sau khi bay chụp, cần thêm nhân lực để làm lưới GCP, Nếu địa hình khó khăn thì việc thành lập lưới GCP cũng gặp khó khăn.
PHẦN 4. HƯỚNG DẪN BAY VÀ XỬ LÝ SỐ LIỆU BAY CHỤP BẰNG PHƯƠNG PHÁP ĐO PPK.
I. CÔNG TÁC CHUẨN BỊ
1. Máy thu GPS 2 tần.
Hiện nay có rất nhiều dòng máy thu GPS 2 tần số được sử dụng trong quá trình bay chụp bằng phương pháp PPK. Ở đây chúng tôi xin giới thiệu cách sử dụng máy GPS 2 tần Esurvey được THC phân phối chính hãng.
Chuẩn bị 1 máy Esurvey đã được sạc đầy pin kèm theo 1 bộ sổ tay Esurvey. Sử dụng chân đế máy, hoặc sào kẹp gương để đặt máy cố định, sẵn sàng cho công tác đo tĩnh để lấy số liệu xử lý.
2. UAV Phantom 4 RTK
UAV được trang bị pin đầy đủ cho cả máy bay và bộ điều khiển, lắp thẻ nhớ còn dung lượng cho máy bay để sãn sàng ghi dữ liệu trong quá trình bay chụp.
II. QUÁ TRÌNH BAY CHỤP
1. Quá trình thu tĩnh bằng máy GPS Esurvey
Máy thu Esurvey được đặt cố định vào mốc đã có sẵn tọa độ, kết nối với sổ tay để vào chế độ đo tĩnh của máy( chú ý đổi tần số đo sang 5hz để đồng bộ với tần số của UAV và nhập chiều cao gương bằng 0 để thuận tiện trong quá trình xử lý số liệu)
Để kiểm tra dữ liệu thu được của máy đo, và lấy dữ liệu sau khi đo tĩnh, ta kết nối máy tính hoặc Smatphone với đầu máy Esurvey thông qua mạng wifi của máy Esurvey. Sau đó truy cập vào đường link của hãng Esurvey 192.168.10.1 để xem dữ liệu thu tĩnh. Sau khi ca bay đo kết thúc ta tiến hành covert dữ liệu đo tĩnh và lưu về máy tính để phục vụ cho quá trình xử lý ảnh. Dữ liệu đo sau khi convert gồm các định dạng 21C, 21G, 21H, 21L, 21N, 21O, ALM , EMS.
2. Tạo khu bay và tiến hành bay cho Phantom 4 RTK.
Máy bay được kết nối với bộ điều khiển để tạo khu bay. Khu bay được import sẵn vào bộ điều khiển thông qua thẻ nhớ dưới dạng file kml hoặc tạo trực tiếp. Phantom 4 RTK có nhiều định dạng để lựa chọn đường bay như 2D, 3D… Sau khi tạo khu bay thì tiến hành cho máy bay bay bình thường mà ko cần kết nối thêm với Base, hay trạm Cors nào khác.
Số liệu sau khi bay bao gồm toàn bộ ảnh và các định dạng file thu được từ vệ tinh như BIN, OBS, MRK được lưu trữ trong thẻ nhớ của máy bay.
III. XỬ LÝ ẢNH
1. Tính tọa độ tâm ảnh
Trong quá trình bay, cả GPS Esurvey và Phantom 4 RTK đều thu cùng lúc các tín hiệu vệ tinh GNSS. Tất cả các ảnh bay chụp đều đã có tọa độ tâm ảnh do thiết bị RTK gắn trên máy bay định vị. Nhưng tọa độ này chưa đạt độ chính xác cao, vì vậy cần đưa về hệ tọa độ chuẩn mà Esurvey thu tĩnh được thông qua các phần mềm chuyên ngành. Ở đây chúng tôi sử dụng phần mềm Viet-PPK do công ty Trắc địa Toàn Việt cung cấp.
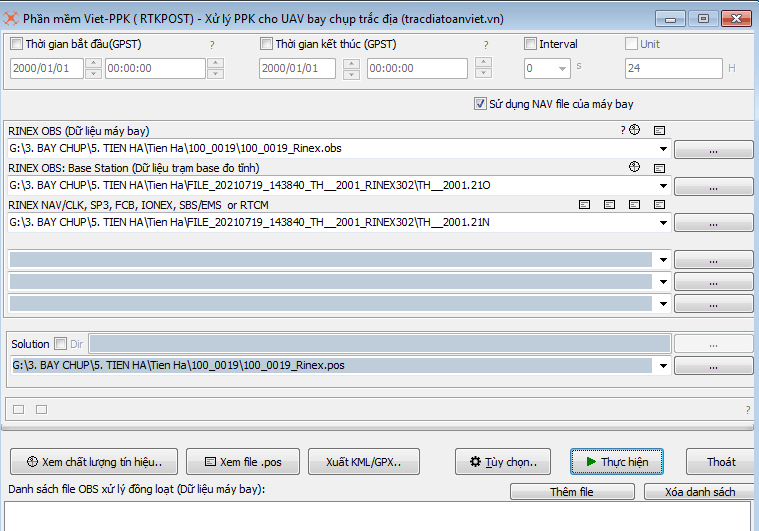
Số liệu đưa vào xử lý bao gồm: Tọa độ đặt base, file OBS từ máy bay, file 21O, file 21N từ máy Esurvey. Tiến hành chạy phần mềm để tạo ra file có định dạng POS, đây là file chứa tọa độ tâm ảnh chính xác sau khi xử lý. Sau khi chạy xong, thì dùng file exel có sẵn trong phần mềm để lọc lại tọa độ tâm ảnh và lưu lại ở định dạng text bình thường để đưa vào trong các phần mềm xử lý ảnh.
2. Xử lý ảnh
Có nhiều phần mềm xử lý ảnh đang được dùng hiện nay như UAS Master, Trimble Info, Pix 4D Mapper…Ở đây chúng tôi dùng phần mềm Agisoft Metashape
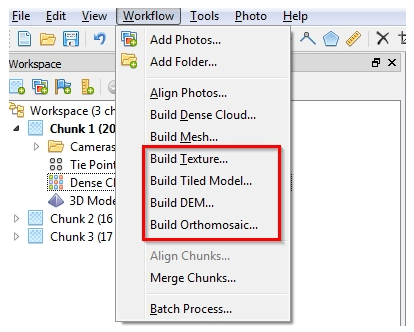
Ảnh chụp được Import vào phần mềm ở dạng Folder hoặc ảnh riêng lẻ, sau đó Import file tọa độ tâm ảnh đã xử lý ở bước trước vào. Phần mềm sẽ tự gắn tọa độ tâm ảnh cho tất cả các ảnh bay chụp. Chọn hệ tọa độ địa phương phù hợp để đưa tọa độ tâm ảnh về đúng tọa độ VN200 chuẩn. Sau đó tiến hành các bước xử lý ảnh lần lượt như: sắp xếp ảnh chụp (Align Photos), tạo dữ liệu đám mây (Build Dence Cloud), tạo mô hình 3D( Build Mesh), sau đó xây dựng các dữ liệu tùy chọn như: Build Texture, Build Tiled Model, Build Dem, Build Othormosaic.
Phần mềm xử lý Agisoft Metashape chạy tương đối nặng, vì vậy đòi hỏi máy tính phải có cấu hình cao để tránh các trường hợp treo máy trong quá trình xử lý ảnh.
IV. XUẤT KẾT QUẢ BAY CHỤP VÀ KIỂM TRA CHẤT LƯỢNG ẢNH
1. Kết quả bay chụp
Tùy vào mục đích và yêu cầu của công việc, mà cần thiết sử dụng sản phẩm nào của quá trình xử lý. Thông thường sản phẩm được tạo ra gồm mô hình số độ cao DEM và bình đồ ảnh Othormosaic. Trước khi Export thì cần cắt bỏ viền ngoài của mô hình để phần mô hình bên trong đạt độ chính xác cao nhất.
Sản phẩm Export lưu ở định dạng raster( GEOTIFF-32bit) và định dạng ASC II.Dễ dàng cho việc đưa vào các phần mềm chuyên ngành để hoàn thiện bản vẽ sau khi bay chụp.
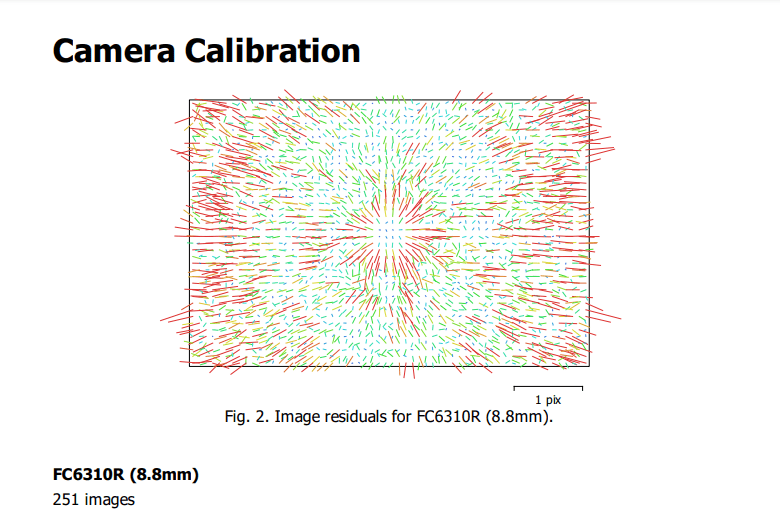
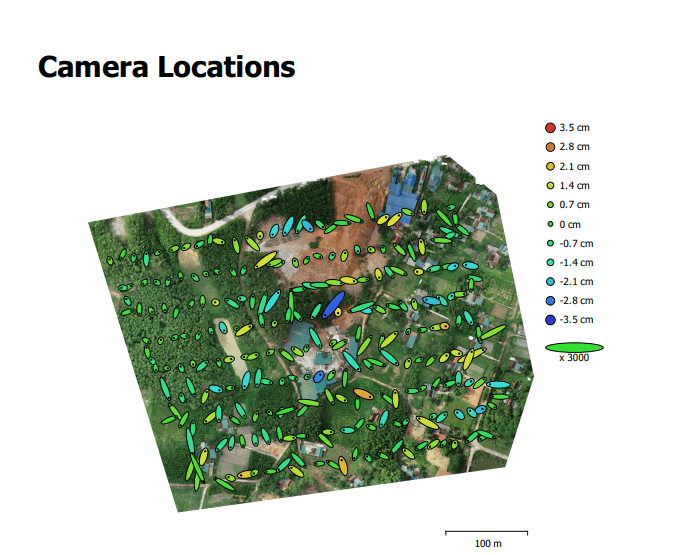
2. Kiểm tra chất lượng ảnh bay chụp.
Để biết được độ chính xác và chất lượng ảnh sau khi xử lý phần mềm Agisoft Metashape sẽ cho phép ta xuất ra báo cáo đánh giá bay chụp để làm cơ sở kiểm tra và nghiệm thu sản phẩm bay chụp.
PHẦN 5. MỘT SỐ DỰ ÁN BAY CHỤP THỰC HIỆN BỞI CÔNG TY THC
1. Bay chụp khảo sát địa hình 500 Ha tại khu du lịch Pù Luông, Bá Thước, Thanh Hóa.
2. Bay chụp khảo sát dự án tại Hoằng Minh,Hoằng Hóa, Thanh Hóa.
3. Bay chụp khảo sát dự án tại Hợp Thành, Triệu Sơn, Thanh Hóa

Tin nổi bật

Phần mềm biên tập bản đồ địa chính VietMap XM – giải pháp chuyên sâu cho ngành trắc địa
-
Phần mềm ADS Civil - công cụ không thể thiếu trong đo đạc và xây dựng
-
Phần mềm BaseCamp miễn phí cho máy định vị GPS cầm tay Garmin
-
Mách bạn cách đọc bản đồ địa hình dễ hiểu, chính xác nhất
-
Trắc địa thi công cầu đường: Giải pháp đảm bảo an toàn và bền vững





Tin tức liên quan
-
Phần mềm biên tập bản đồ địa chính VietMap XM – giải pháp chuyên sâu cho ngành trắc địa
-
Phần mềm ADS Civil - công cụ không thể thiếu trong đo đạc và xây dựng
-
Phần mềm BaseCamp miễn phí cho máy định vị GPS cầm tay Garmin
-
Mách bạn cách đọc bản đồ địa hình dễ hiểu, chính xác nhất
-
Trắc địa thi công cầu đường: Giải pháp đảm bảo an toàn và bền vững
